作為國內領先的工業總線產品專家,每一款產品都是根據市場的需求及用戶痛點而開發;十年來應用場景深度探索,助力實際應用的效能提升;嚴苛的元器件選用,只為竭盡所能提升國產替代過程中的用戶體驗,堅守高性能、高可靠性的原則,打造國產精品。
查看更多138-6173-3648
發布時間:2024/11/29
作者:無錫凌科自動化技術有限公司
所屬分類:公司新聞
ES-04DMA脈沖定位模塊在上下料中的應用

01 行業背景
丨實現高精度定位控制
脈沖定位模塊能夠實現高精度的位置控制,這在大載重上下料中至關重要。在搬運重型機械零部件的場景中,例如大型機床的床身部件,其重量可能達到數噸甚至數十噸。脈沖定位模塊通過精確控制電機的脈沖數來驅動運輸設備(如行車、自動導引車等),可以將位置精度控制在毫米級別。原理是根據電機的步距角和脈沖數的關系來確定位移。例如,一個步距角為 1.8° 的電機,每接收 200 個脈沖旋轉一圈。如果驅動輪的周長是 1 米,那么每個脈沖對應的位移就是 1 米 / 200 = 5 毫米。這樣就可以根據需要搬運的距離準確地發送脈沖信號,使重物精確地到達上下料位置
丨負載適應性強
大載重的物料搬運往往會對定位系統產生較大的沖擊和負載變化。脈沖定位模塊具有良好的負載適應性。在建筑行業,當搬運大型預制混凝土梁(重達幾十噸)進行上下料時,脈沖定位模塊可以根據負載的變化自動調整電機的驅動扭矩。它通過電流反饋等機制,當檢測到電機負載增大(如在啟動或遇到障礙物時),增加脈沖信號的強度來提供足夠的動力,確保重物能夠按照預定的位置和速度進行搬運。并且在負載變化過程中,依然能夠保持較高的定位精度,不會因為負載的波動而導致位置偏差過大
丨與自動化系統集成
脈沖定位模塊能夠很方便地與自動化控制系統集成,實現大載重上下料的自動化流程。在自動化倉庫中,對于重型貨物的存儲和取出操作,脈沖定位模塊可以接收來自倉庫管理系統(WMS)的指令。當需要取出一個位于高層貨架的重型貨物(如大型電機設備)時,WMS 發送貨物的位置坐標信息給脈沖定位模塊,模塊根據坐標計算出電機所需的脈沖數,驅動堆垛機準確地到達貨物位置,完成下料操作。同時,在進料時,也能按照預設的存儲位置信息將重物精準地上料放置到相應的貨架位置,提高了倉庫空間的利用率和貨物出入庫的效率
多軸協同定位
在一些復雜的大載重上下料設備中,如具有多個自由度的工業機器人手臂用于搬運大型鍛造件,脈沖定位模塊可以實現多軸協同定位。每個關節電機都有相應的脈沖定位控制。以六軸機器人為例,當搬運一個大型航空發動機部件進行上下料時,脈沖定位模塊會同時控制六個關節電機的脈沖信號。通過運動學模型和逆運動學算法,根據目標位置和姿態,精確地計算每個關節電機所需的脈沖數,使機器人手臂能夠靈活、精準地將重物放置在指定的上下料位置,實現復雜空間中的精確定位操作
丨負載適應性強
大載重的物料搬運往往會對定位系統產生較大的沖擊和負載變化。脈沖定位模塊具有良好的負載適應性。在建筑行業,當搬運大型預制混凝土梁(重達幾十噸)進行上下料時,脈沖定位模塊可以根據負載的變化自動調整電機的驅動扭矩。它通過電流反饋等機制,當檢測到電機負載增大(如在啟動或遇到障礙物時),增加脈沖信號的強度來提供足夠的動力,確保重物能夠按照預定的位置和速度進行搬運。并且在負載變化過程中,依然能夠保持較高的定位精度,不會因為負載的波動而導致位置偏差過大。
丨速度和位置的精準調節
脈沖定位模塊不僅可以控制位置,還能精準調節運動速度。在大載重上下料過程中,根據不同的工況和安全要求,需要合理控制重物的搬運速度。例如,在化工企業中,當搬運大型反應釜(重量大且內部可能含有危險化學品)進行上下料時,在反應釜接近目標位置時,脈沖定位模塊可以逐漸降低脈沖頻率。這樣就能夠使運輸設備(如行車)緩慢、平穩地將反應釜放置到指定位置,避免因速度過快而產生碰撞,確保上下料過程的安全和準確。同時,在空載返回等情況時,又可以提高脈沖頻率,加快設備的運行速度,提高工作效率
02 現場應用圖片


03 ES-04DMA功能簡介
● 支持4通道NPN高速脈沖輸出,最高輸出脈沖頻率:200k/軸
● 可接入16通道NPN 數字量輸入,8個NPN 數字量輸出。
● 位置控制/速度→位置切換控制
● 原點回零(近點狗式)
● 點動功能(JOG)
● 遞增與絕對定位切換
● 支持S型和T型曲線加減速,實現速度方面的精細變化,確保加減速平穩
● 可以按照外部設備的需求修改I/O的邏輯
● 支持快速啟動,在位置控制起動時每個軸起動時間縮短到1ms,多軸同時啟動時沒有啟動延時
● 模塊可適配PROFINET,ETHERNET/IP,CC-Link IE FB,ETHERCAT,MODBUS TCP的耦合器,與西門子,三菱,歐姆龍等各大主流國內外PLC品牌適配。
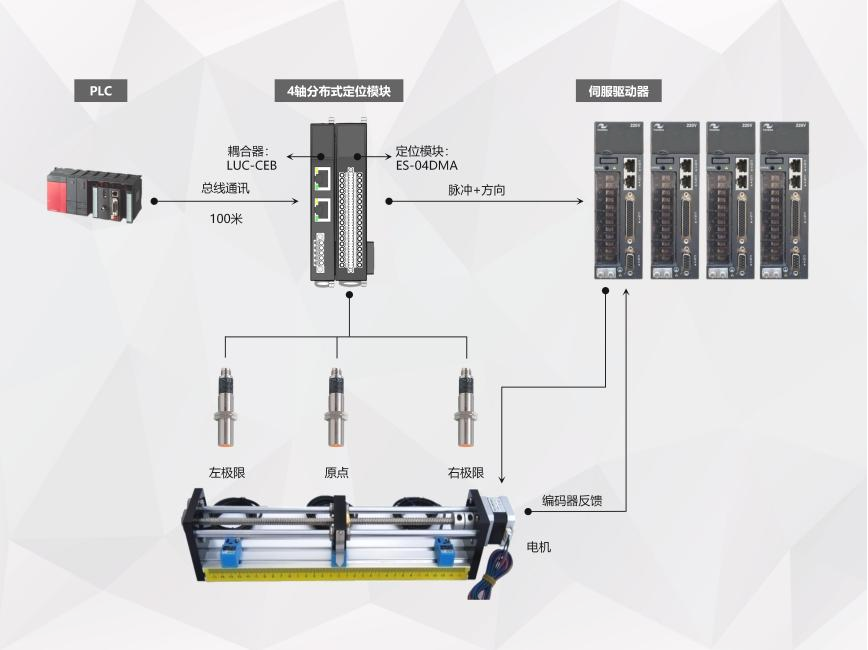
04 應用拓撲圖
05 產品實物圖

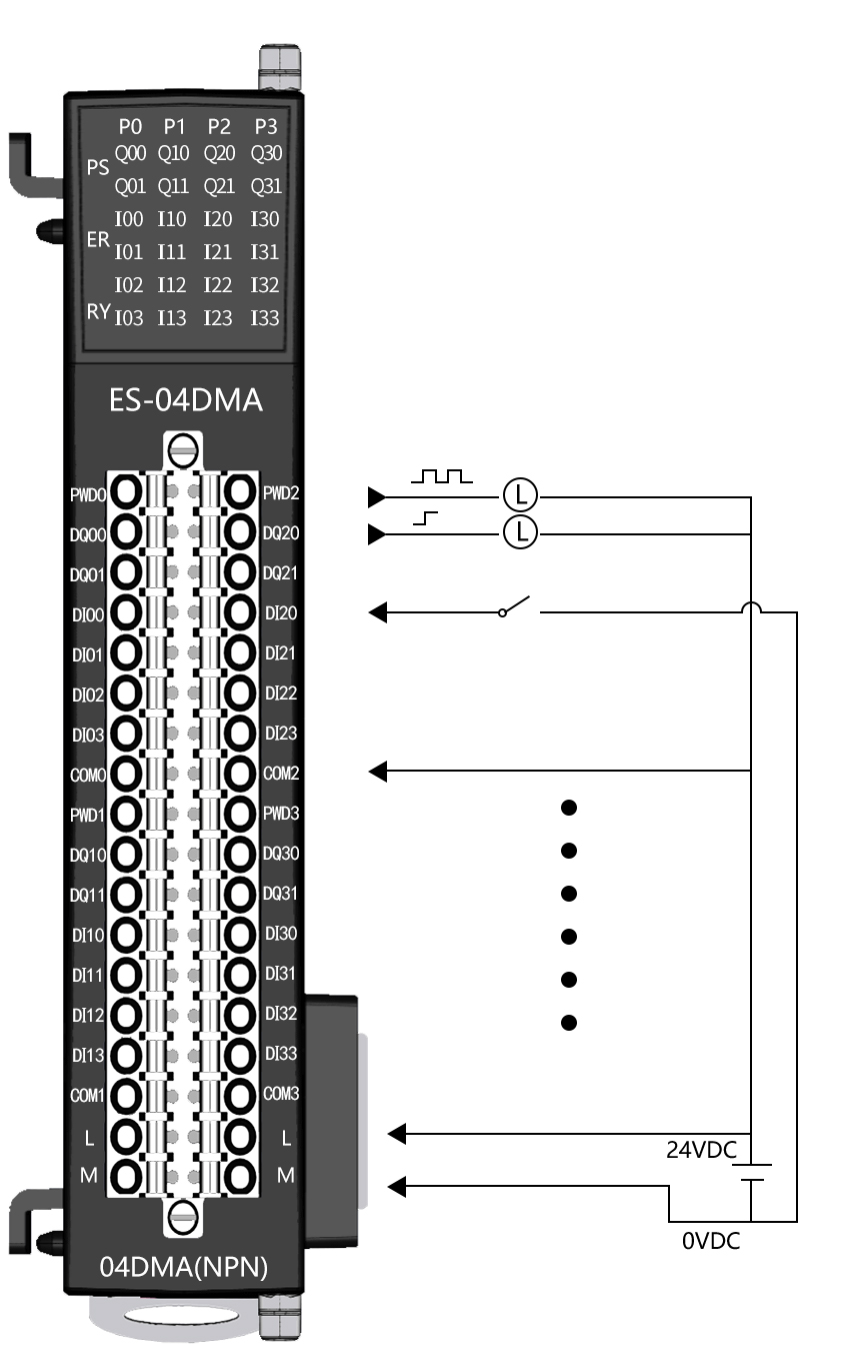
06 接線圖
07 設置步驟解析(西門子博圖軟件為例)
第一步:硬件連接正確連接
S7-1200PLC與遠程IO模塊電源,將測試對象PLC的網口, 通過網線插入到遠程IO模塊的X1口, 后將遠程IO模塊的X2 口通過網線接入到調試電腦網口上。

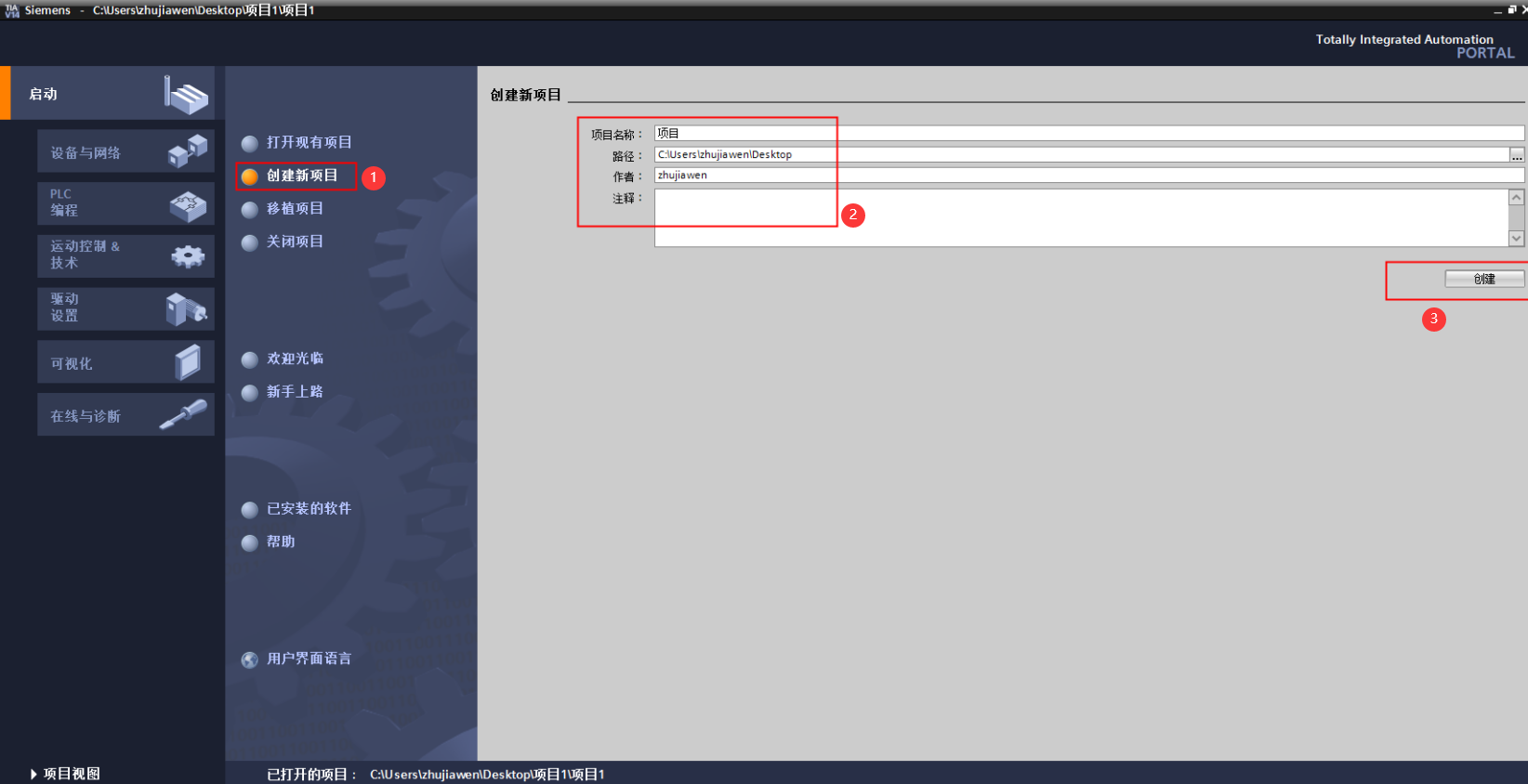
第二步:建立示例工程
新建工程打開 TIA Portal 軟件,選擇“創建新項目”,并填寫項目名稱、路徑、版本、作者等相關信息,點擊創建:
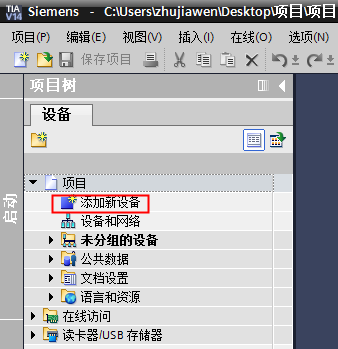
CPU的添加與連接。點擊界面左邊的“項目”,出現下級目錄,并雙擊“添加新設備”:
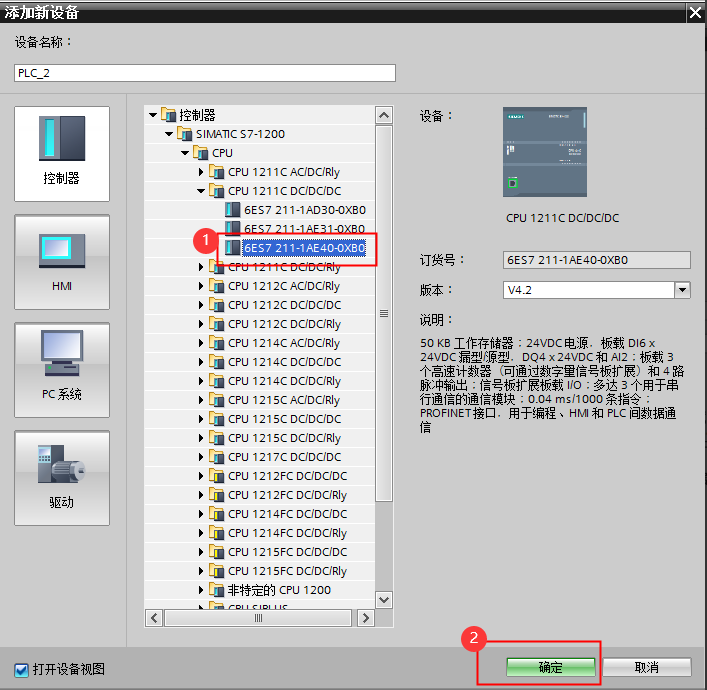
彈出“添加新設備” 窗口,進行“控制器/SIMATIC S7-1200/CPU→CPU 1211C DC/DC/DC→6ES7 211-1AE40-0XB0” 操作,點擊確定:
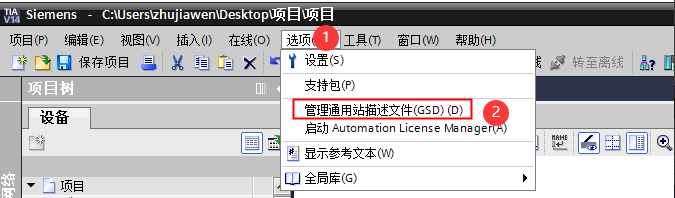
添加凌科LUC-PN的管理通用站描述文件。點擊菜單欄的“選項” 按鈕, 選擇“管理通用站描述文件(GSD)”:
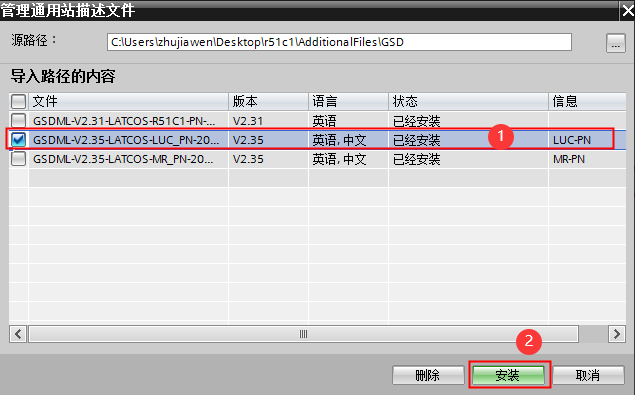
選擇源路徑(準備階段存放的位置),勾選文件夾,點擊“安裝”即可:
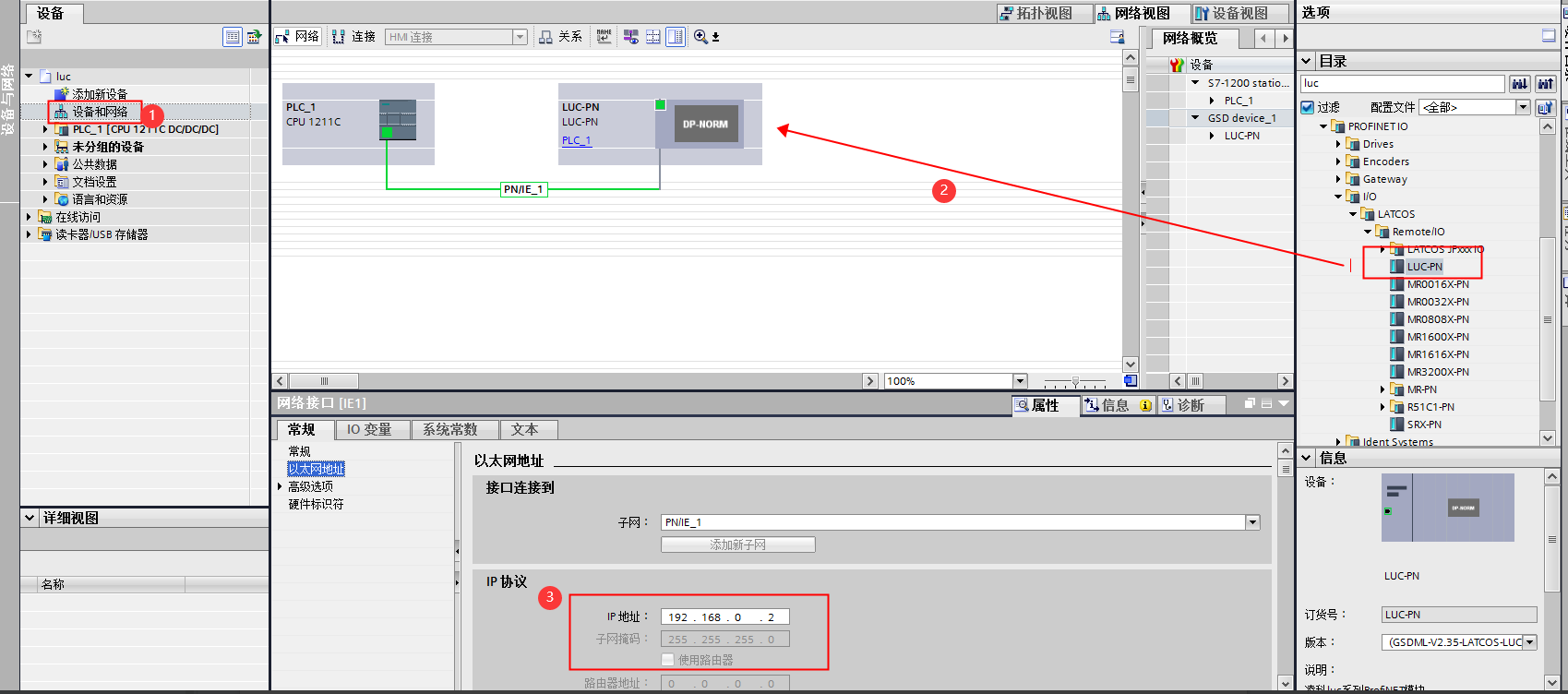
添加LUC-PN模塊。選擇中間界面的“網絡視圖”,在右側硬件目錄找到“LUC-PN” 拖拽到左側網絡視圖,并設置IP地址:
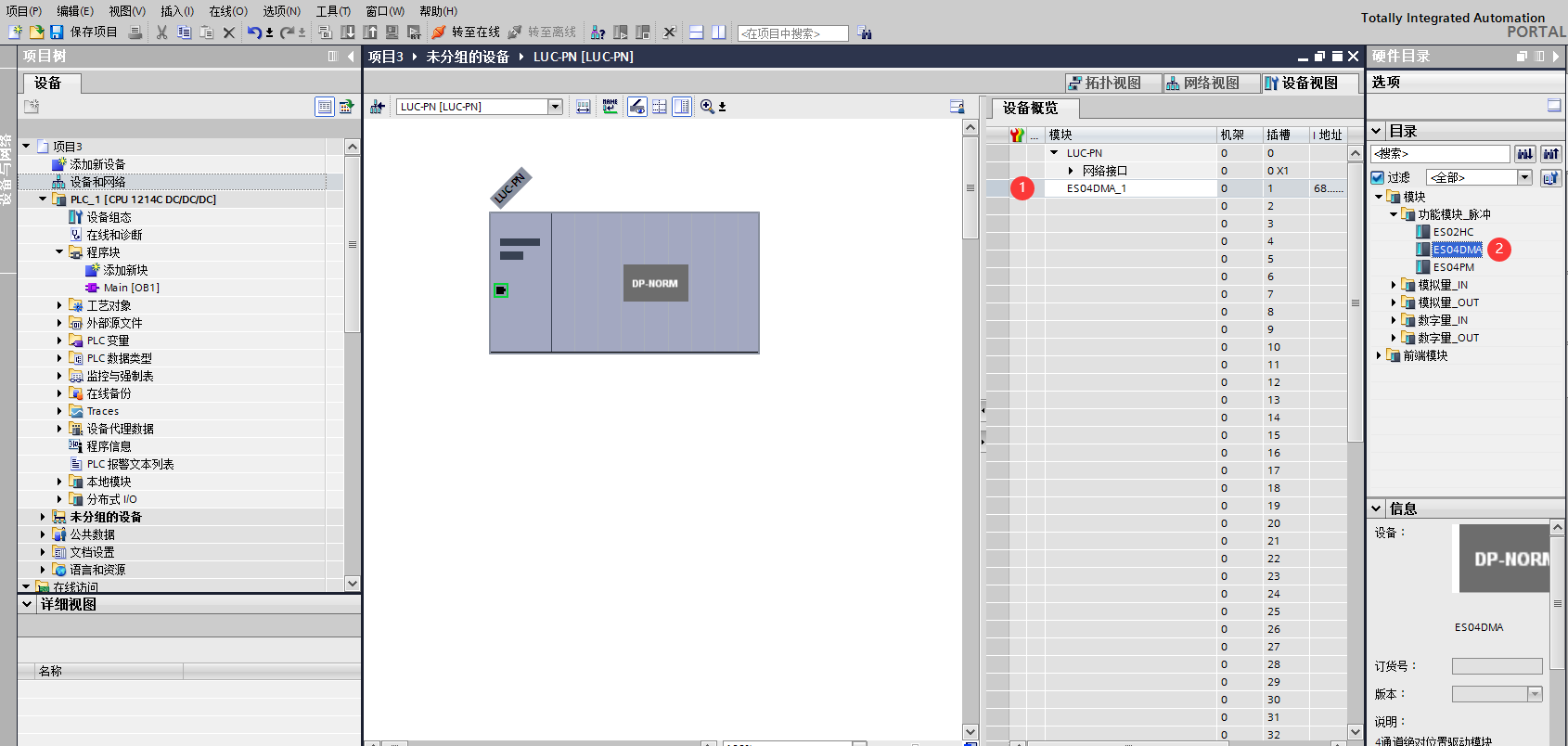
添加ES-04DMA硬件。雙擊后TIA Portal軟件右上角區域會出現LUC-PN擴展模塊的信息。先選中插槽1,再選擇“功能模塊_脈沖”再雙擊ES04DMA。
第三步:ES-04DMA屬性設置
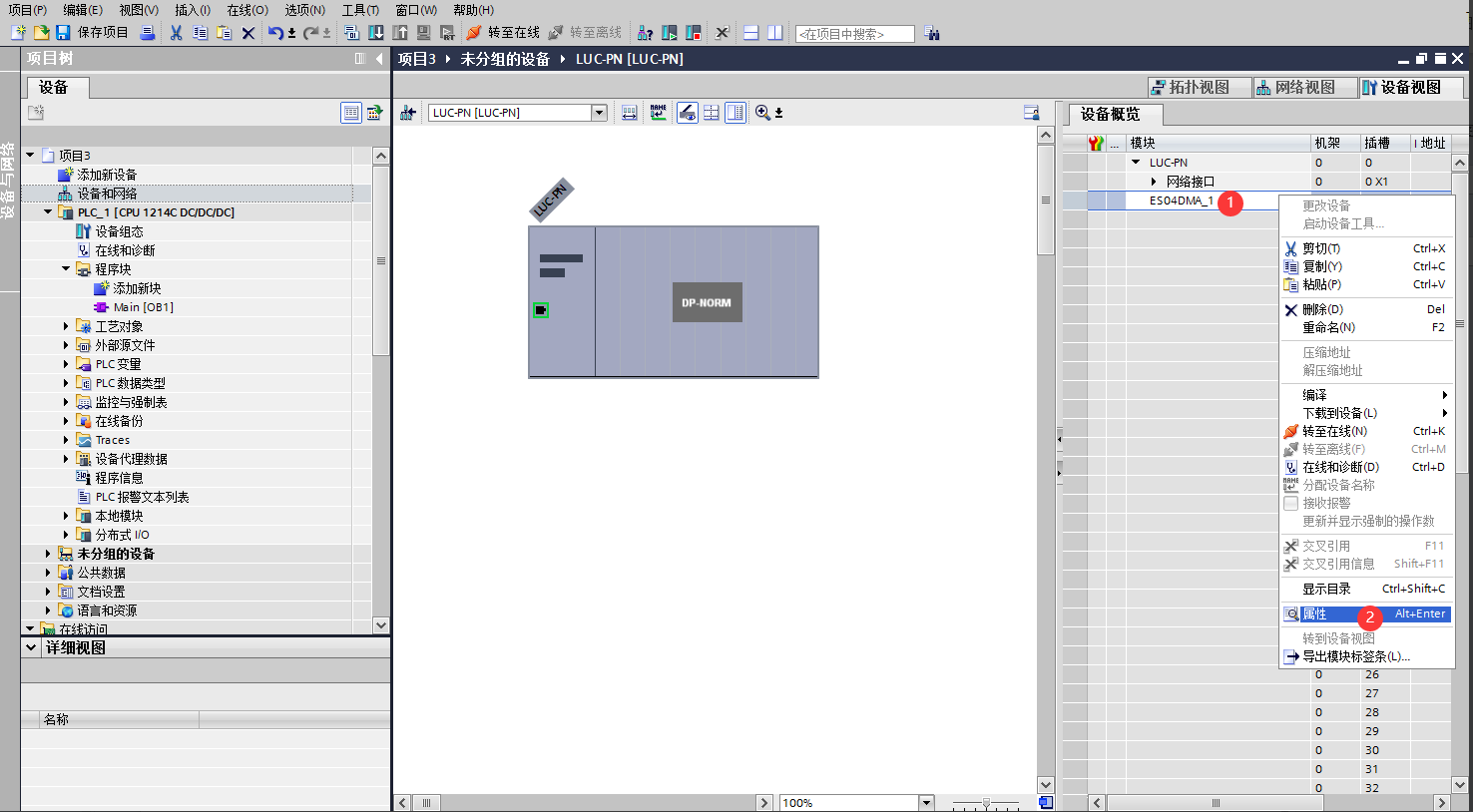
選中插槽1的ES04DMA,右擊選擇屬性,系統會跳出ES04DMA的屬性對話框
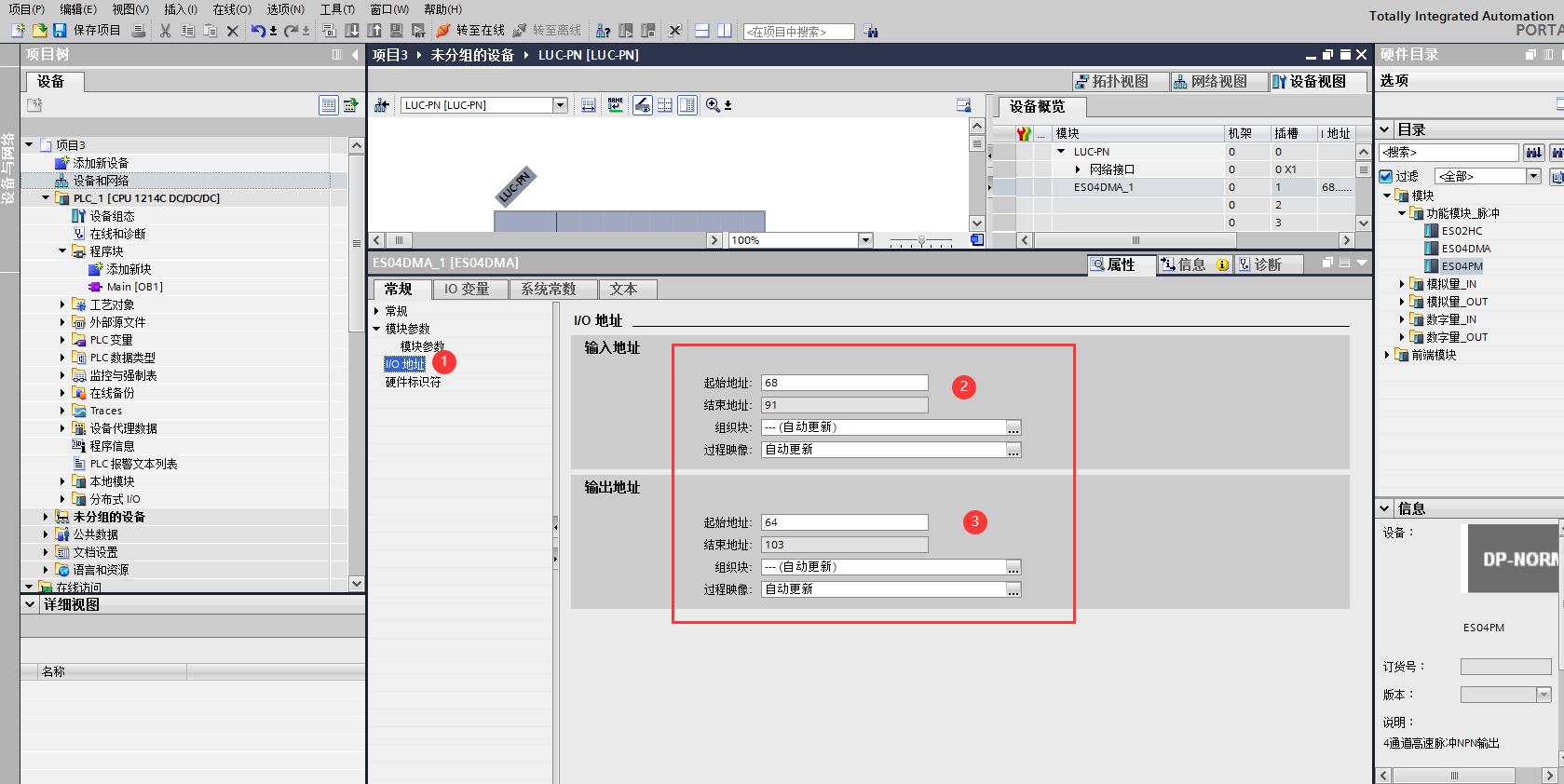
I/O地址設置。選中常規中的I/O地址,紅色區域中顯示了輸入地址的起始地址:68,結束地址91,表示輸入地址從I68.0~I91.7;輸出地址的起始地址:64,結束地址103;表示輸出地址從Q64.0~Q103.7。這個地址為模塊默認地址,我們這里不做修改
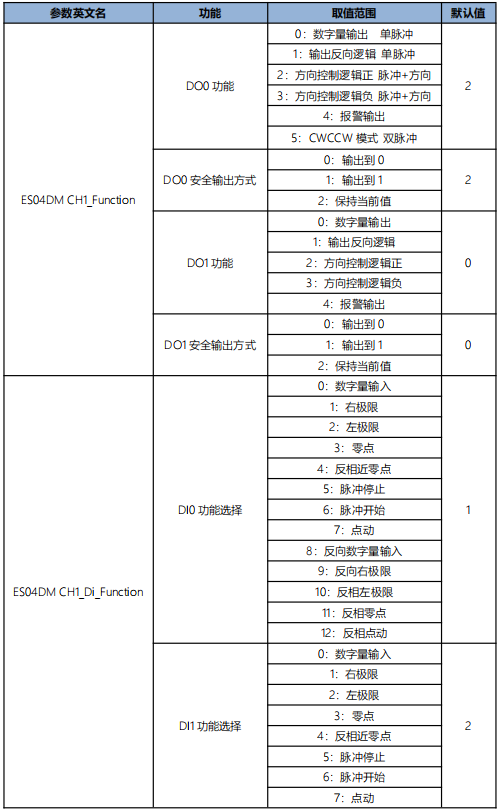
第四步:ES-04DMA內部模塊參數設置
選中常規中的模塊參數,紅色區域中顯示了通道一的參數
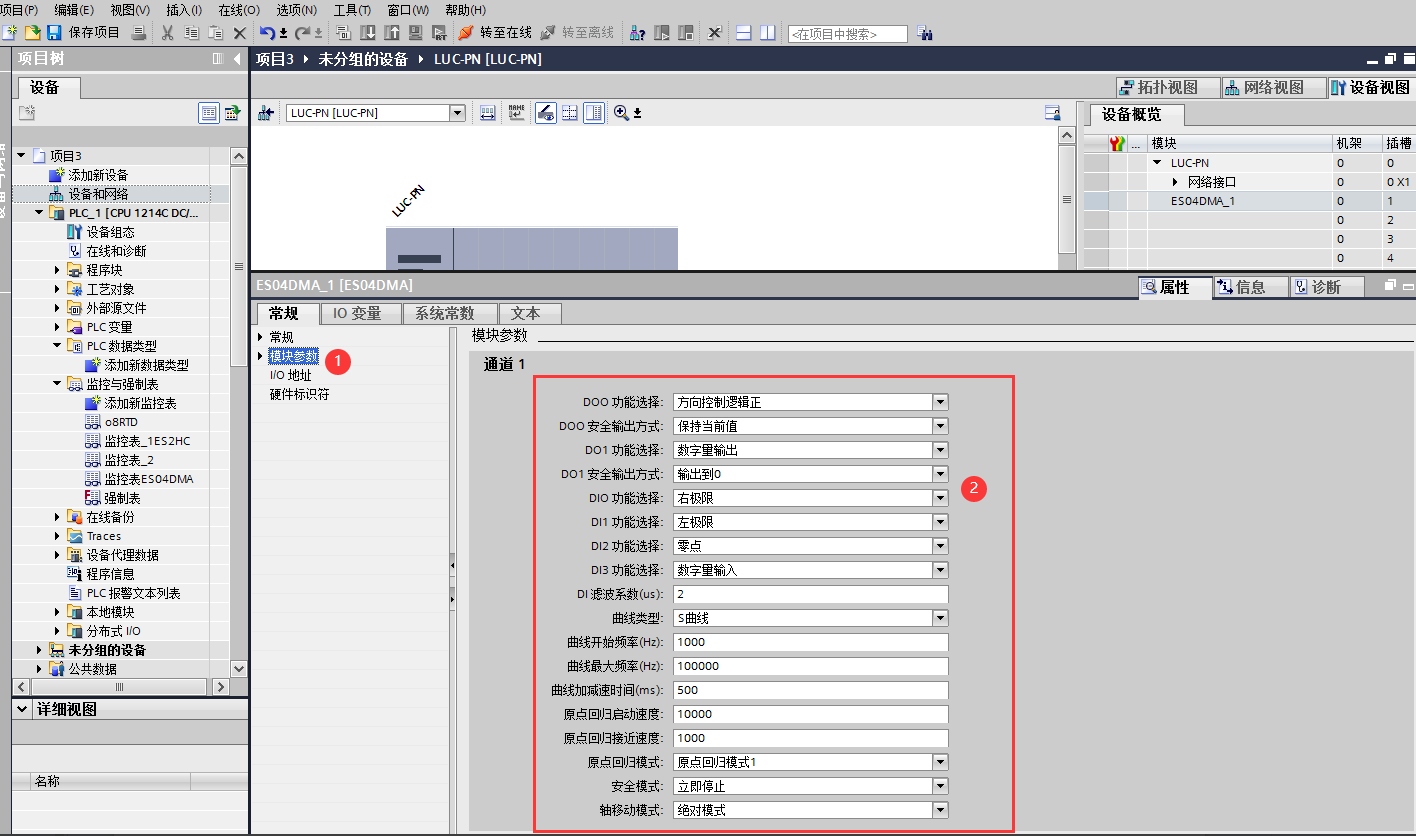
參數默認狀態:
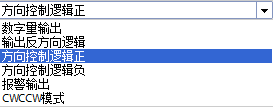
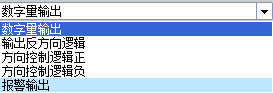
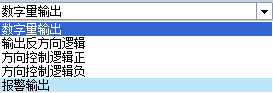
參數1:DO0功能選擇,默認為方向控制邏輯正
參數2:DO0安全輸出方式,默認輸出到0
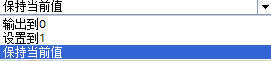
參數3:DO1功能選擇,默認為數字量輸出
參數4、DO1安全輸出方式,默認為輸出到0
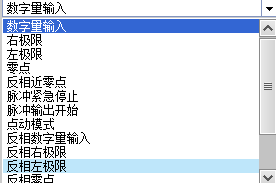
參數5:DI0功能選擇,默認為右極限

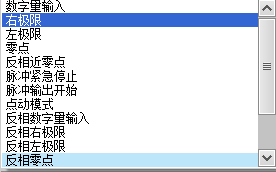
參數6:DI1功能選擇,默認為左極限
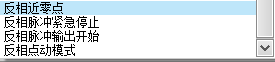
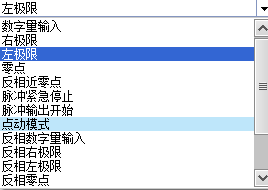
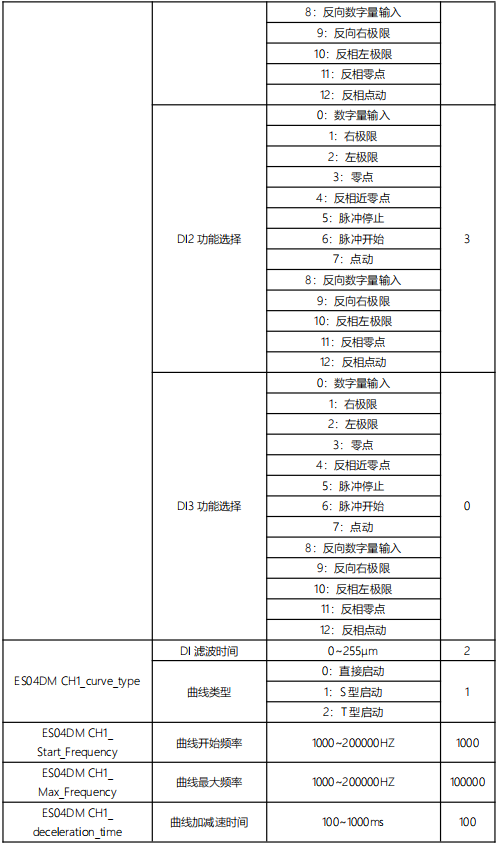
參數7:DI2功能選擇,默認為零點

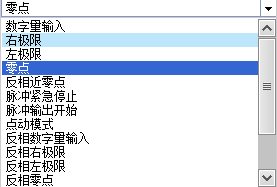
參數8:DI3功能選擇,默認為數字量輸入
參數9:DI濾波系數,默認為2

參數10:曲線類型,默認為S曲線
參數11:曲線類型開始頻率,默認為1000HZ

參數12:曲線類型最大頻率,默認為100000HZ

參數13:曲線加減速時間,默認為500ms

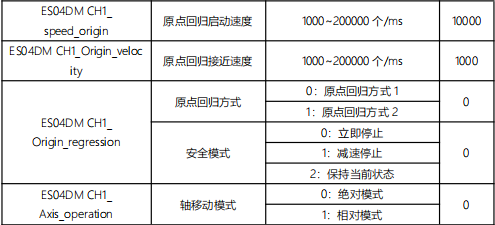
參數14:原點回歸啟動速度,默認為10000脈沖

參數15:原點回歸接近速度,默認1000脈沖

參數16:原地回歸模式,默認為原點回歸模式1

參數17:安全模式,默認為立即停止

參數18:軸移動模式,默認為絕對模式
配置參數定義:
第五步:創建ES-04DMA的地址監控表
根據I/O的輸出地址從Q68.0~Q91.7,創建如下監控表,設置如下控制字/位


根據I/O的輸入地址I68.0~I91.7,創建如下輸入監控表,設置如下狀態字/位


說明:通道二、三、四參考通道一即可。控制字/位相鄰通道相差10個字,如通道一運行目標位置:QD64,通道二運行目標位置:QD74,通道三運行目標位置:QD84,通道四運行目標位置:QD94。
狀態字/位相鄰通道相差6個字,如通道一當前位置:ID68,通道二當前位置:ID74,通道三當前位置:ID80,通道四當前位置:ID86。
第六步:設置PROFINET通訊參數
先在模塊的未分配上左擊鼠標,選擇PLC_1.PEOFINET 接口_1,即可將LUC-PN的模塊連入PROFINET網絡中


設置項目中的S7-1200的IP地址及分配LUC-PN的IP地址和設備名稱。選中網口,右擊屬性,在以太網地址中設定IP地址。

確認和修改遠程IO設置設備名稱方式,通過網絡視圖的模塊直接分配設備名稱

選擇正確的網卡,然后更新列表

根據MAC碼選擇相應的模塊分配設備名稱,設置后 PLC 上電時會根據網絡中的設備分配名稱分配 IP 地址,務必要保證硬件設備名稱與軟件的設備名稱要一致

程序編譯下載,在項目樹中,選中需要下載的項目文件夾,然后執行菜單命令"在線〉下載到設備"或直接點擊工具欄上的圖標"下載到設備

如果需要下載修改過的硬件組態且CPU處于運行模式時,需要把CPU轉為停止模式.


下載中心
產品手冊、配置文件、選型手冊
定制行業解決方案
138-6173-3648
技術支持
提供7*24h
銷售微信

技術微信